[선형대수] Quadratic Forms, Principal Axes Theorem, Positive Definite Matrix
안녕하세요! 이번 포스트에서는 이차 형태(Quadratic Forms) 에 대한 내용과 양의 정부호(Positive Definite) 의 의미를 정리하고자 합니다. 바로 시작하겠습니다 😊
1. Quadratic Forms
먼저 이차형태(Quadratic Forms)의 정의부터 알아보겠습니다.
Def. 어떠한 nxn 대칭행렬 $A$에 대해, $\mathbb {R^n}$의 이차형태 는 $\mathbb {R^n}$에서 정의된 함수 $Q$를 의미하는 것으로, 벡터 $x\in \mathbb {R^n}$에서의 함숫값은 $Q(x)=x^\intercal Ax$으로 계산된다. 이 행렬 $A$를 matrix of the quadratic form 이라고 일컫는다.
즉, 대칭행렬 $A$에 대해, $\small Q(x)=x^\intercal Ax$의 형태를 이차형태라고 하는데요. 예를 들어 벡터 $\small \boldsymbol x=\begin{pmatrix} x_1 \cr x_2\end{pmatrix}$에 대하여 다음과 같은 대칭행렬들이 있을 때, 이차형태를 계산하면 다음과 같습니다.
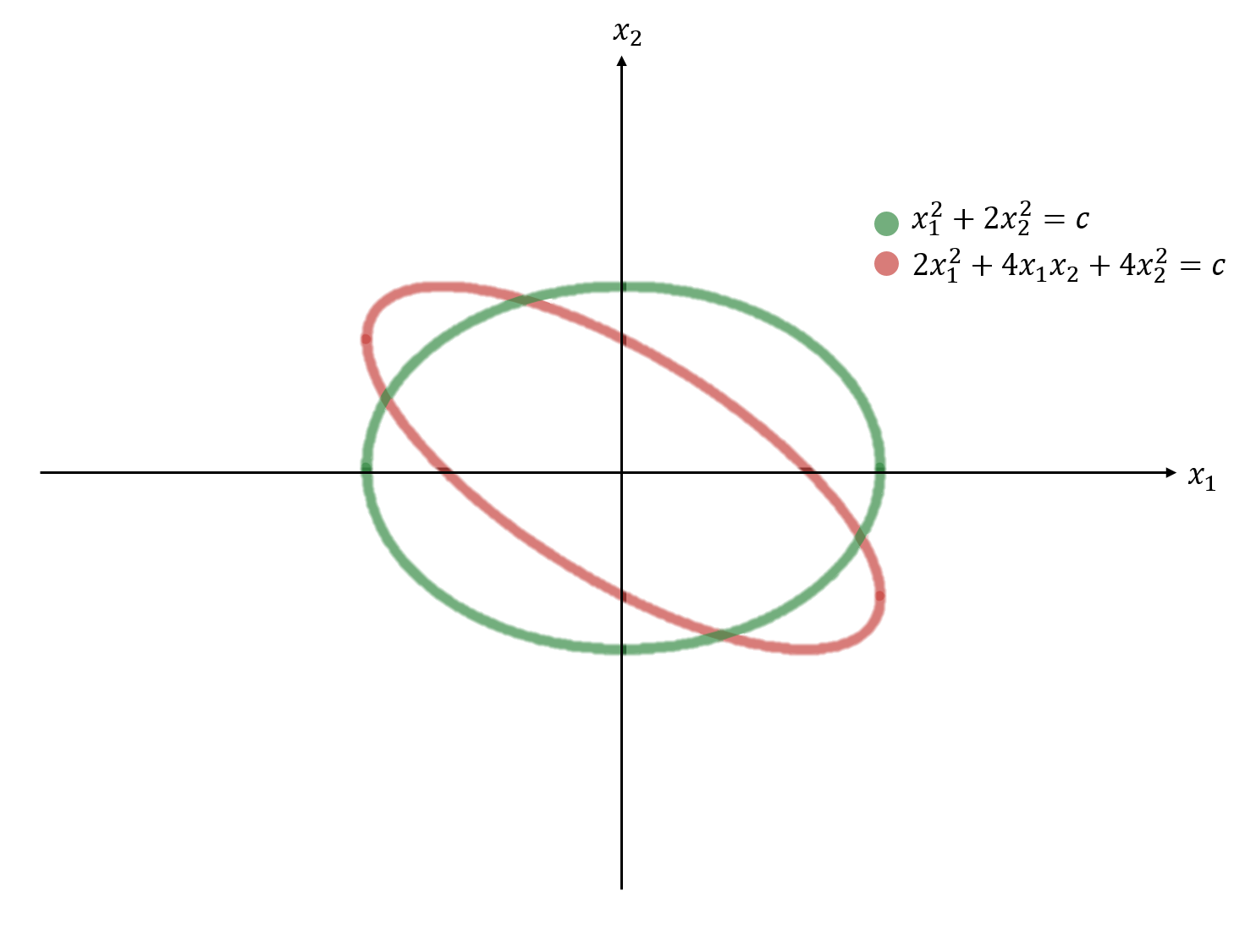
- $\small A=\begin{bmatrix} 1 & 0\cr 0&2 \end{bmatrix}$일 때, $\small x^\intercal Ax=\begin{bmatrix}x_1&x_2\end{bmatrix} \begin{bmatrix} 1 & 0\cr 0&2 \end{bmatrix} \begin{bmatrix}x_1\cr x_2 \end{bmatrix}=x_1^2+2x_2^2$
- $\small A=\begin{bmatrix} 2 & 2\cr 2&4 \end{bmatrix}$일 때, $\small x^\intercal Ax=\begin{bmatrix}x_1&x_2\end{bmatrix} \begin{bmatrix} 2 & 2\cr 2&4 \end{bmatrix} \begin{bmatrix}x_1\cr x_2 \end{bmatrix}=2x_1^2+4x_1x_2+4x_2^2$
이제 이 이차형태들을 임의의 상수 $c$에 대하여 그림으로 나타내면 아래 그림과 같을 것입니다. 첫번째 이차형태의 경우 축들을 기준으로 타원형 그래프가 표준 위치(Standard Position) 에 있고, 두번째 이차형태의 경우 그래프가 사선 방향의 타원형이네요. 그런데 이 이차형태들의 함숫값들 중에서 원점과의 거리가 가장 긴 좌표를 찾는 문제를 생각해 봅시다. 첫번째의 경우 특별한 계산과정이 필요도 없이 $x_2=0$일 때의 좌표가 문제의 답이 된다는 것을 알 수 있습니다. 반면, 두번째의 경우 이 문제에 대한 답을 구하는 과정은 조금 더 복잡합니다. 두번째 이차형태의 경우에는 cross-product 항 $4x_1x_2$이 존재하기 때문입니다. 여러가지 행렬들을 계산해보면, 대각 행렬의 경우 cross-product 항이 존재하지 않고, 대각행렬이 아닌 대칭행렬의 경우에는 cross-product 항이 존재한다는 것을 알 수 있습니다.
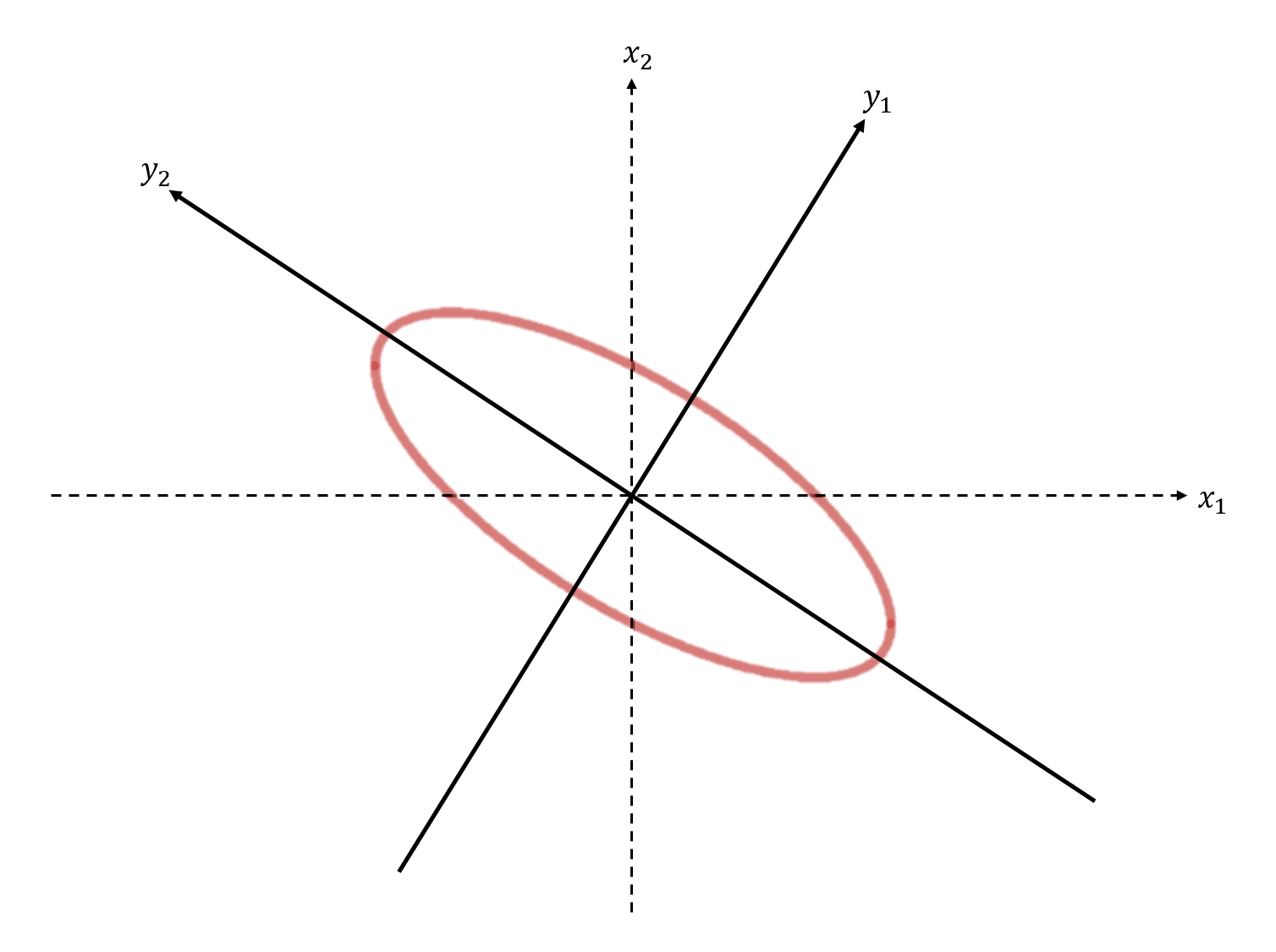
돌아와서 두번째 이차형태의 경우 이 문제에 대한 답을 어떻게 찾을 수 있을까요? 아래 그림처럼 축을 바꿔보면, 새로운 축에 대해서는 그래프가 표준 위치에 놓이게 되는 것을 볼 수 있습니다. 이 새로운 축 $y_1, y_2$에 대해서는 두번째 이차형태가 cross-product항을 가지지 않게 되어, 여러가지 최적화 문제에 대해서도 계산이 훨씬 쉬워질 것입니다. 그렇다면 이 새로운 축은 어떻게 구하면 될까요? 위에서 대각행렬의 경우 이차형태가 cross-product 항을 가지지 않는다는 것을 알게 되었는데요. 그렇다면 행렬의 대각화를 이용해서 대각행렬로 만들어주는 아이디어를 어떻게 이용하면 되지 않을까요? 이 과정은 변수 변환(change of variable) 을 이용합니다.
2. Change of Variable in a Quadratic Form
$\boldsymbol x$가 $\mathbb R^n$의 어떠한 변수 벡터라고 합시다. 이제 $\mathbb R^n$의 새로운 변수 벡터 $\boldsymbol y$에 대하여 다음을 만족하는 invertible matrix $P$가 존재한다고 하겠습니다.
\[\boldsymbol x=P\boldsymbol y \quad or\quad \boldsymbol y=P^{-1}\boldsymbol x\]위와 같은 식을 변수 변환 했다고 합니다! $P$의 열들을 $u_1,u_2,\cdots,u_n$이라 하고, 이 열들로 결정되는 기저를 $\small B=\lbrace u_1,u_2,\cdots,u_n\rbrace$라 할 때, $\boldsymbol y$는 $\boldsymbol x$가 기저 $B$에 의해 표현될 때 $\boldsymbol x$의 좌표벡터(coordinate vector)인 것입니다. ($\small i.e.\space \boldsymbol y=\begin{bmatrix}\boldsymbol x\end{bmatrix}_B$)
\[x=Py=\begin{bmatrix} \boldsymbol{u_1}& \cdots &\boldsymbol{ u_n}\end{bmatrix} \begin{pmatrix}y_1\cr\vdots\cr y_n\end{pmatrix}=y_1\boldsymbol{u_1}+\cdots +y_n\boldsymbol{u_n}\]이제 이것을 이차형태 $\small x^{\intercal}Ax$에 대입하면 다음과 같이 될 것입니다.
\[x^{\intercal}Ax=(Py)^{\intercal}A(Py)=y^{\intercal}P^{\intercal}APy=y^{\intercal}(P^{\intercal}AP)y\]그러면 새로운 이차형태의 행렬이 $\small P^{\intercal}AP$이 되는 것을 확인할 수 있습니다. 이 때, $A$는 대칭행렬이기 때문에, 이전 포스트에서 했던 정리에 의하여 $A$는 직교대각화가 가능합니다. 따라서, $\small P^{\intercal}AP$가 대각행렬 $D$가 되게 하는 orthogonal matrix $P$가 존재합니다. 대각화 포스트에서 했듯이, 이 때의 $P$는 각 열들이 $A$의 고유벡터인 행렬이고, $D$는 대각요소가 각 고유벡터에 해당하는 $A$의 고유값들인 대각행렬입니다.
예를 들어, nxn 대칭행렬 $A$의 고유벡터들이 $u_1, u_2, \cdots, u_n$이고, 고유값들이 $\lambda_1, \lambda_2,\cdots,\lambda_n$일 때, 이차형태 $\small Q(x)=x^{\intercal}Ax=y^{\intercal}Dy$에 대하여, $y=\boldsymbol e_1$이면 어떻게 될까요? 벡터 $x$는 다음과 같이 고유벡터 $u_1$을 의미하고,
\[x=Py=\begin{bmatrix} \boldsymbol u_1 & \cdots & \boldsymbol u_n \end{bmatrix}\begin{pmatrix}1\cr 0\cr \vdots \cr 0\end{pmatrix} = \boldsymbol u_1\]$\small Q$는 $\boldsymbol x=\boldsymbol u_1$일 때 $u_1$에 해당하는 고유값 $\lambda_1$을 출력할 것입니다.
\[\begin{aligned} Q(\boldsymbol x)=x^{\intercal}Ax=y^{\intercal}Dy&=\lambda_1 y_1^2+\lambda_2 y_2^2+\cdots +\lambda_n y_n^2\\ &=\lambda_1+0+\cdots+0=\lambda_1 \end{aligned}\]혹은 반대로 $\boldsymbol x$을 알고 있을 때 $\boldsymbol y$는 다음과 같이 구할 수 있습니다.
\[y=P^{-1}x=P^{\intercal}x\]이차형태의 변수변환에서의 x와 y의 관계가 조금 이해되시나요? 이제 이 모든 것을 정리하는 정리가 바로 Principal Axes Theorem 입니다.
The Principal Axes Theorem. $A$가 nxn 대칭행렬이라고 하자. 그러면 이차형태 $\small x^{\intercal}Ax$를 cross-product 항이 존재하지 않는 이차형태 $\small y^{\intercal}Dy$로 변환시키는 직교 변수변환 $\small \boldsymbol x=P \boldsymbol y$이 존재한다.
이 정리에서 $P$의 열들이 바로 이차형태 $\small x^{\intercal}Ax$의 Principal Axes 입니다. 그리고 새로운 벡터 y는 principal axes로 이루어진 orthonormal basis로 표현된 좌표계에서 $x$의 좌표벡터를 의미합니다. 어떠한 행렬이 대각행렬이면, 이차형태 그래프는 표준 위치에 놓이게 된다는 것을 기억하실 것입니다. 따라서, principal axes를 찾는다는 것은 그래프를 표준 위치에 놓이게 하는 새로운 좌표계를 찾는다는 것을 의미합니다.
3. Classifying Quadratic Forms
이차형태의 함숫값들의 부호에 따라 이차형태를 분류할 수 있는데요. 먼저 정의부터 알아봅시다.
Def. 이차형태 $Q$는,
a. 모든 $\boldsymbol x \not=0$에 대하여 $\small Q(\boldsymbol x)>0$이면, positive definite 이다.
b. 모든 $\boldsymbol x \not=0$에 대하여 $\small Q(\boldsymbol x)<0$이면, negative definite 이다.
c. $\small Q(\boldsymbol x)$가 양의 값, 음의 값을 모두 가지면, indefinite 이다.
또한, 모든 $\boldsymbol x$에 대해 $\small Q(\boldsymbol x)\ge 0$이면, $Q$는 positive semidefinite 이라고 하고, $\small Q(\boldsymbol x)\le 0$이면, $Q$는 negative semidefinite 이라고 말합니다. 이렇게 이차형태의 함숫값들의 부호에 따라 이차형태를 다양하게 분류한다는 것을 알게 되었습니다. 다만 모든 0이 아닌 벡터 $\boldsymbol x$에 대해 $\small Q(\boldsymbol x)$를 알아야 한다는 것인데, 너무 번거롭겠죠? 실제로 이차형태를 판별하는 다양한 방법이 있지만, 그 중에서도 쉬운 방법은 바로 고유값들의 부호를 확인하는 것입니다!
Thm. $A$가 nxn 대칭행렬이라고 하자. 그러면 이차형태 $\small x^{\intercal}Ax$가,
a. positive definite이기 위한 필요충분조건은 $A$의 고유값들이 모두 양수인 것이다.
b. negative definite이기 위한 필요충분조건은 $A$의 고유값들이 모두 음수인 것이다.
c. indefinite이기 위한 필요충분조건은 $A$가 양의 고유값, 음의 고유값을 모두 가지는 것이다.
왜 그럴까요? 위에서 Principal Axes Theorem 에 의하여, 다음을 만족하는 직교변환 $\boldsymbol x = P\boldsymbol y$가 존재합니다. 이 때, 모든 0이 아닌 $\boldsymbol x$와 모든 0이 아닌 $\boldsymbol y$ 사이에는 일대일 대응이 존재하기 때문에, $\small Q(x)$의 부호는 결국 $A$의 고유값들의 부호에 달려있다고 할 수 있습니다!
\[Q(\boldsymbol x)=x^{\intercal}Ax=y^{\intercal}Dy=\lambda_1 y_1^2+\lambda_2 y_2^2+\cdots +\lambda_n y_n^2\]그렇다면 여기서 유추할 수 있는 성질이 있는데요. 어떤 대칭행렬 $A$의 이차형태 $\small x^{\intercal}Ax$가 positive definite 이라면, 행렬 A는 가역(invertible)이라는 것입니다! $\small x^{\intercal}Ax$가 positive definite 이면, $A$의 고유값들이 모두 양수라는 것을 의미하고, 고유값들이 모두 양수이면 행렬식 또한 양수가 되어 $A$가 가역이라는 것을 의미하게 됩니다.
여기까지 이차형태와 변수변환, 그리고 이차형태 판별에 대한 내용이었습니다! 조금 이해가 되셨나요? 통계학에서는 특히 공분산 행렬이 대칭행렬이라는 것을 이용하여, 특히 positive definite 행렬이라 가정하고 다양한 연산을 하게 됩니다. 다음에는 이차형태에서의 Constrained Optimization에 대해 포스팅하겠습니다. 감사합니다 :)
$Reference.$
- David C.Lay · Stephen R.Lay · Judi J.McDonald, Linear Algebra and its Applications, 5th edition, Pearson
- 고려대학교 김홍중 교수님의 수업
{kind=link}